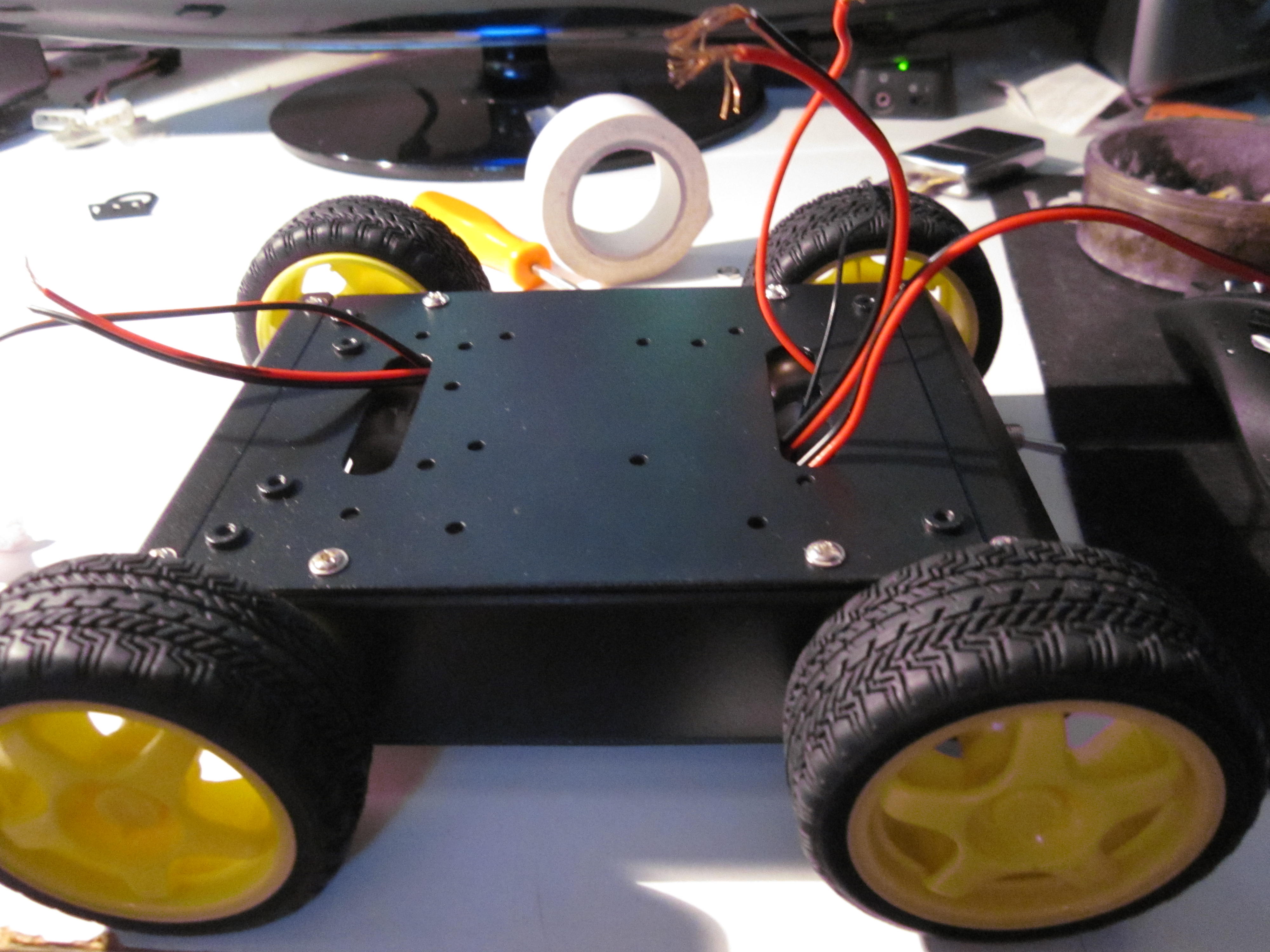
Voici quelques photos du robot, une fois montée sans la plateforme supérieures. J’ai suivis cette review pour le monter qui est plus ou moins bien faites surtout sur la fin.
Concernant le kit, il est de très bonne facture, les matériaux semblent solide et le montage est relativement simple malgré le fait qu’il n’y ait aucune documentation au sein du kit. Heureusement grâce a votre ami google, vous pouvez trouver tout un tas de vidéo et autre pour vous aider a monter la bèbète.
Concernant le montage en lui même, tout est compris dans le pack hormis le fer a souder, un tournevis et une pince que vous devrez avoir sous la main pour en venir a bout. Sachez aussi que la board qui est fournie avec n’est pas faites pour être monter nativement sur cette plateforme, ainsi vous devrez trouver un moyen de la fixer par vous même. Personnellement j’ai suivis le conseil de la review en installant des cheville. Ainsi une simple tige filetée et quelques écrous et vous avez une carte fixée de façon surélevé sur votre base métallique.
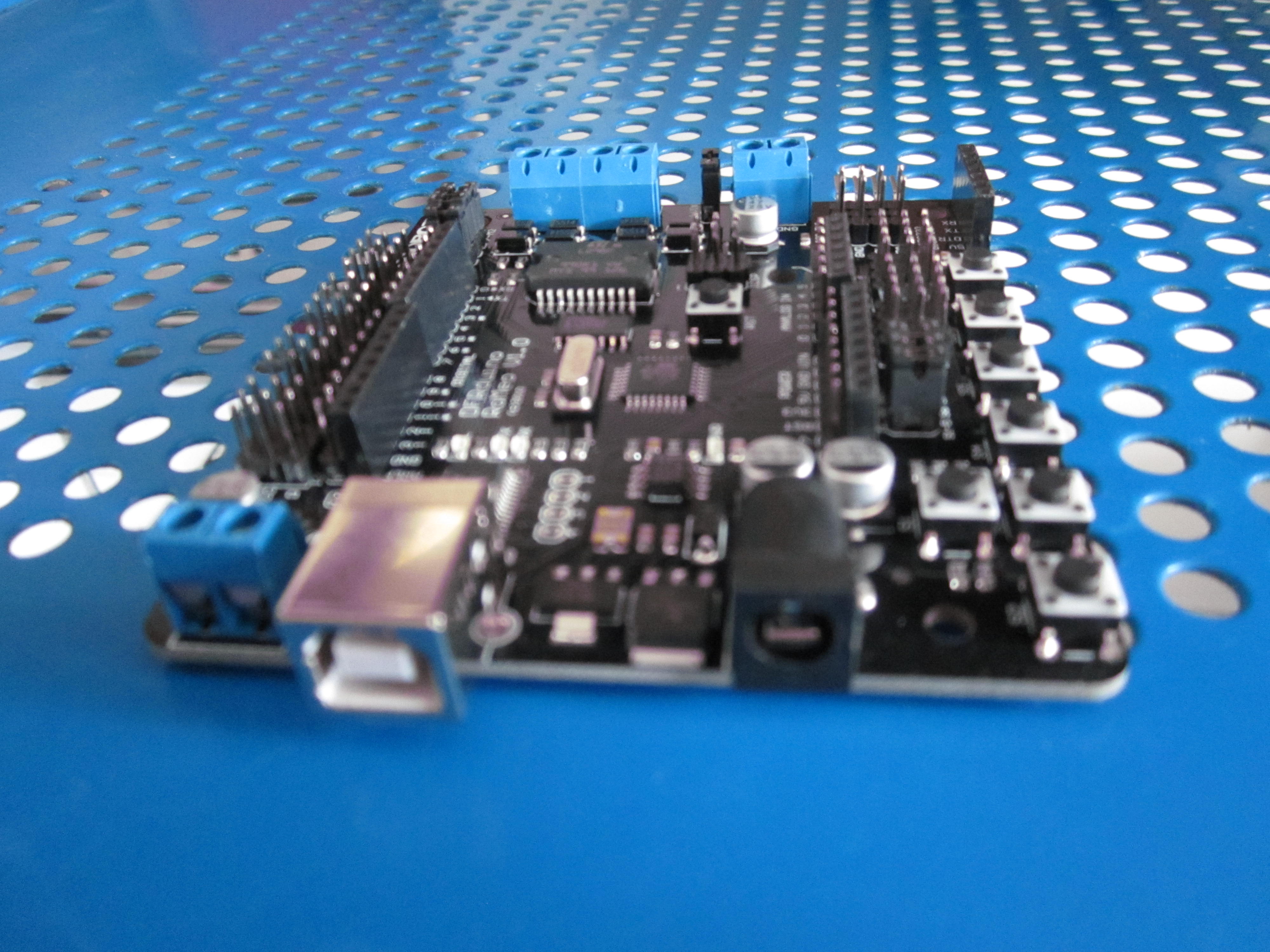
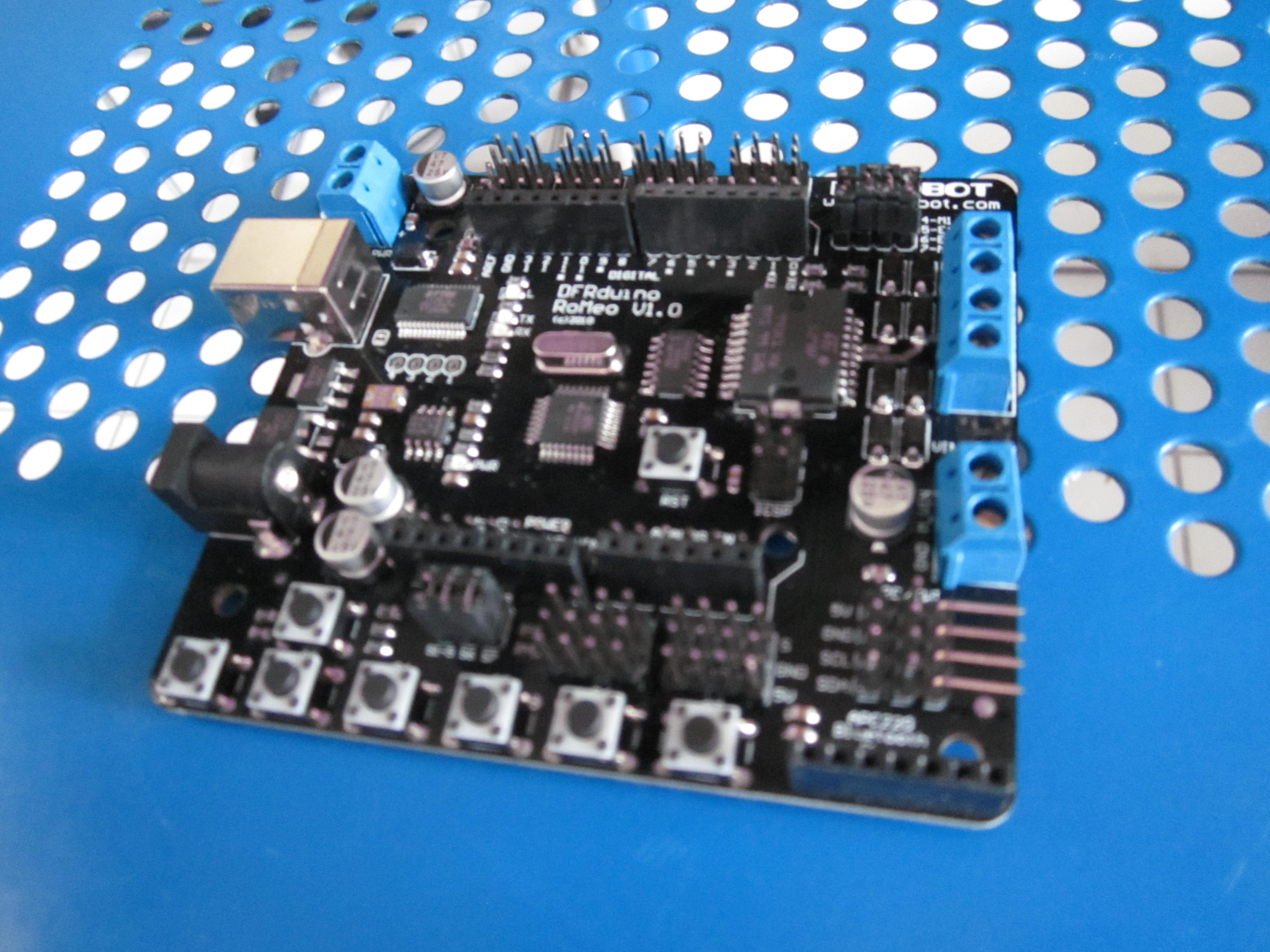
Voici quelques photos du contenu du pack et des différentes étapes de montage :



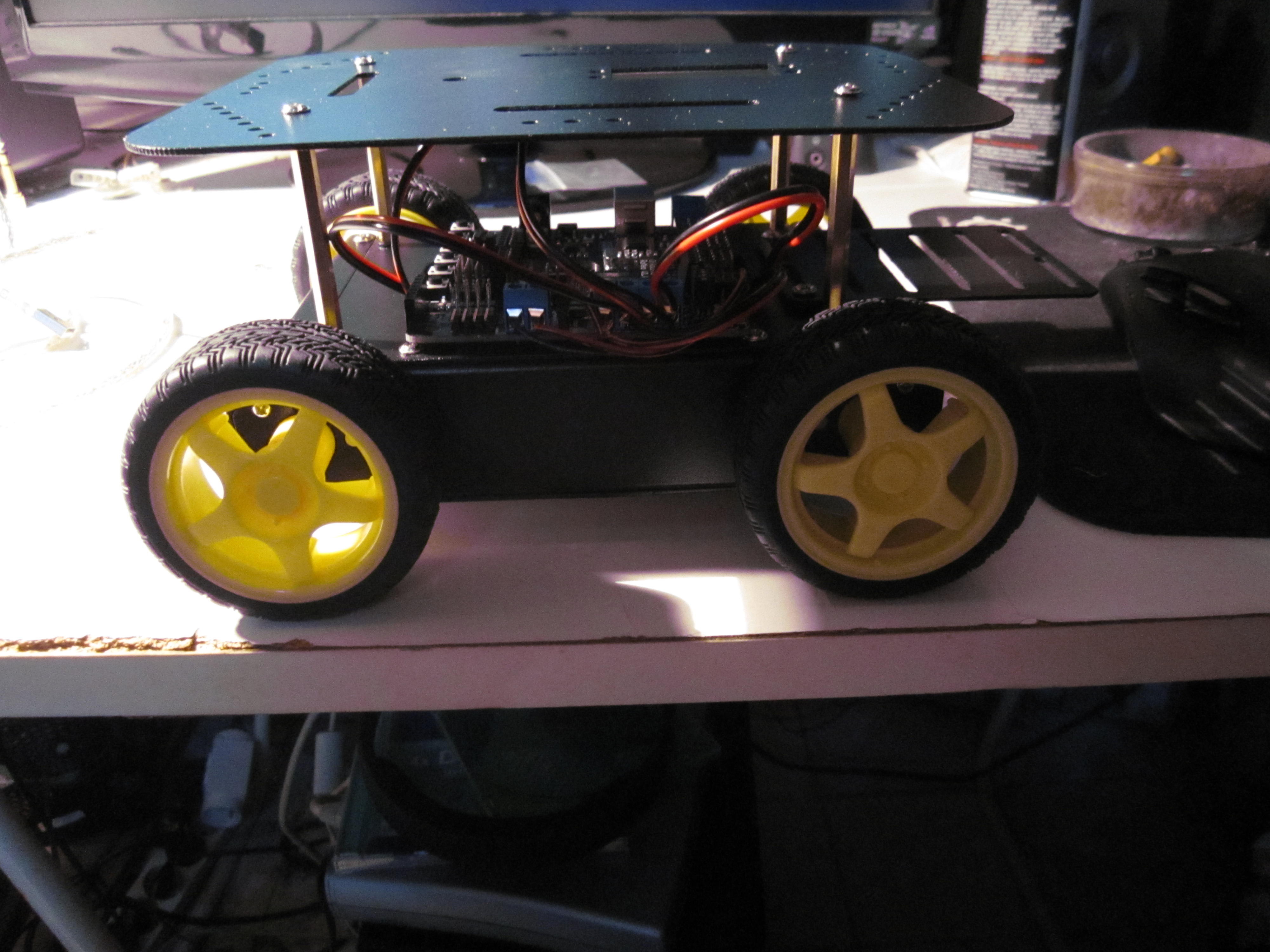

Donc voila en quelques heures, grace a ce superbe pack, vous avez une plateforme mobile fonctionnelle et opérationnelle. De plus, celle ci est facilement upgradable puisque vous avez la plateforme supérieur qui est libre pour vous permettre de rajouter capteurs, tourelles, carte programmable et moultes périphériques.
Prochaine étape ? Test des moteurs, intégration de capteur et développement de l’algo qui permettra au robot d’effectuer une ronde dans un environnement clos.
